This page has been translated into French by Kate Bondareva. The translation may be found here: http://www.autoteiledirekt.de/science/recherche-hexapode-robotique-2
The hexapod robot developed by the Illinois hexapod group is modeled after the American cockroach, Periplaneta americana.
We selected this insect as a model because of its extraordinary speed and agility and because the structure and physiology of this
insect are reasonably well known. The body of the robot measures 58 cm by 14 cm by 23 cm length, width, and height. It has an
additional 15 cm ground clearance when standing. The legs, projecting laterally and to the front, add about 38 cm to the width
and 18 cm to the length. The robot weighs approximately 11 kg, most of the weight being in the valves that control the pneumatic actuators.
The physical dimensions of the robot body and legs are generally between 12 and 17 times the size of the comparable dimensions of the cockroach.
The robot, however, is considerably heavier in relation to its size due to the weight of the valves.
|
|
|
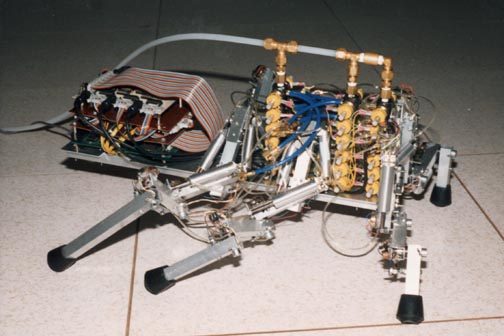
Hexapod robot, MARK I. The robot is powered by compressed air, which enters through the tube from the left. Three stacks of electronically
controlled valves (yellow), six pair in each stack, control the flow of air into the cylinders that are attached to each leg segment. (Some segments
have two cylinders attached for greater power.) The robot is about 2 feet long and weighs roughly 24 pounds.
|
The robot is powered by pneumatic actuators that use a unique valving mechanism to mimic important muscle characteristics such as
force development and compliance, in addition to providing greater strength and higher acceleration compared to many motorized actuators.
Our ultimate objective is to use the structure of an insect in addition to known biological principles for controlling insect walking as
models on which to base the structure of the robot and the organization and operation of its controller. However, in order that we might
build a functioning robot reasonably quickly, we have initially aimed for simplicity in our design. Hence, although we have been guided
by the insect's structural and functional features in developing our robot, we have not attempted to reproduce the insect faithfully in
every detail, and our current locomotion controller does not embody all biological principles that we know to be important.
The development of autonomous walking robots is still in its early stages, but at present our robot can stand, resist perturbations,
and walk. You can observe these actions by clicking on the appropriate image below.
Based on the performance capabilities of current robots, it is clear that engineers still have much to learn about how to produce the
kind of flexible control of movements that insects or other animals seem to use to such good effect. This is where biologically inspired
robots can play a role. Even though the neural basis of locomotor control is not completely understood, biomimetic robots can be used as
research tools to test hypotheses about the relationship between body design and performance, about the role of sensors and actuators in
achieving a certain level of adaptive performance, or about the most efficient way to control multiple elements (the legs) in a flexible
and coordinated fashion. As knowledge of biological systems grows, this knowledge can be applied to robot design and tested to see what
improvements in performance it might lead to.
At the same time, study of biomimetic robots can help the neurobiological community by providing a physical testbed for ideas about how
coordinated locomotion is achieved. Hypotheses ranging from those concerning the mathematics of oscillator theory to those suggesting
the role of specific sense organs in regulating leg movements and coordination can be tested by implementing them in hardware and software.
The ability of a researcher to change a physical arrangement or rewrite software algorithms presents an opportunity to test such hypotheses
in a way not possible in a living animal. The knowledge gained from such experiments should be immediately applicable to improve the design
of the robot, leading to better performance.









![[Robot standing up]](Images/HexRobotThumbnail1.jpg)
![[Robot resisting perturbation]](Images/HexRobotThumbnail2.jpg)
![[Robot walking]](Images/HexRobotThumbnail3.jpg)

